李向涛教授指导的2020级硕士研究生朱浩然的论文UCAV Path Planning for Avoiding Obstacles using cooperative co-evolution Spider Monkey Optimization近日被Knowledge-Based Systems杂志接收。Knowledge-Based Systems是Elsevier出版社旗下工程技术-计算机方向中科院一区期刊,SCI IF(2020)=8.038。
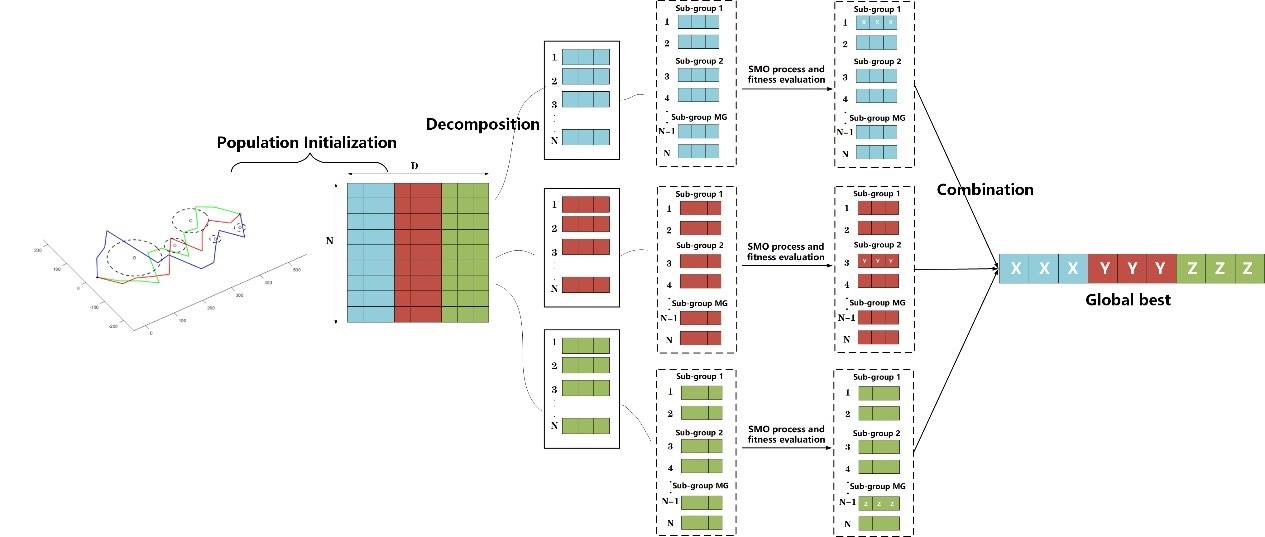
本文提出了一种基于协同进化机制的进化算法,用于解决大规模无人机路径规划问题。算法首先采用“分而治之”思想,将种群按特征分裂为多个子种群,以降低陷入局部最优的风险。然后,设计了一种新型搜索机制,将每个子种群进一步按个体划分为多个子群体,使每个个体的搜索方向多样化。最后,设计了基于SMO算法的搜索机制,进一步强化了搜索效率。为验证算法的有效性,随机生成了40个不同Case与一个超大规模Case,与五种传统EC算法和五种改进EC算法相比,CESMO的表现在每个Case上都有巨大优势,这表明我们的算法是解决无人机路径规划问题的有利工具。本工作结合了群体智能与协同进化等多学科交叉的优势共同完成。通讯作者为公司李向涛教授。